Kinesthesia : Ron Resch Modülü Kullanılarak Kullanıcı Etkileşimli Strüktür Tasarımı

Kinesthesia – structural change
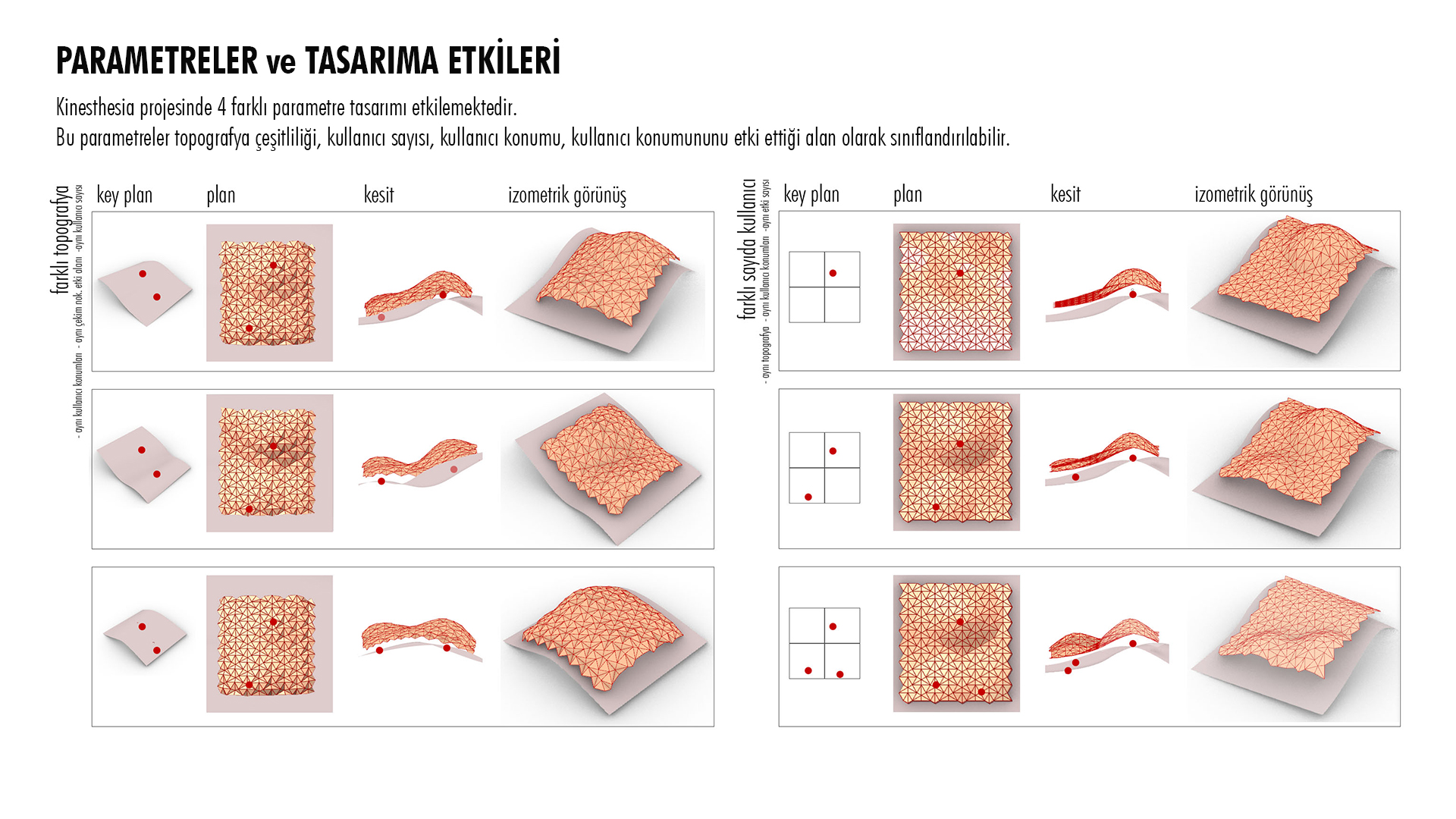
Structural change – structure change according to parameters.1.jpg
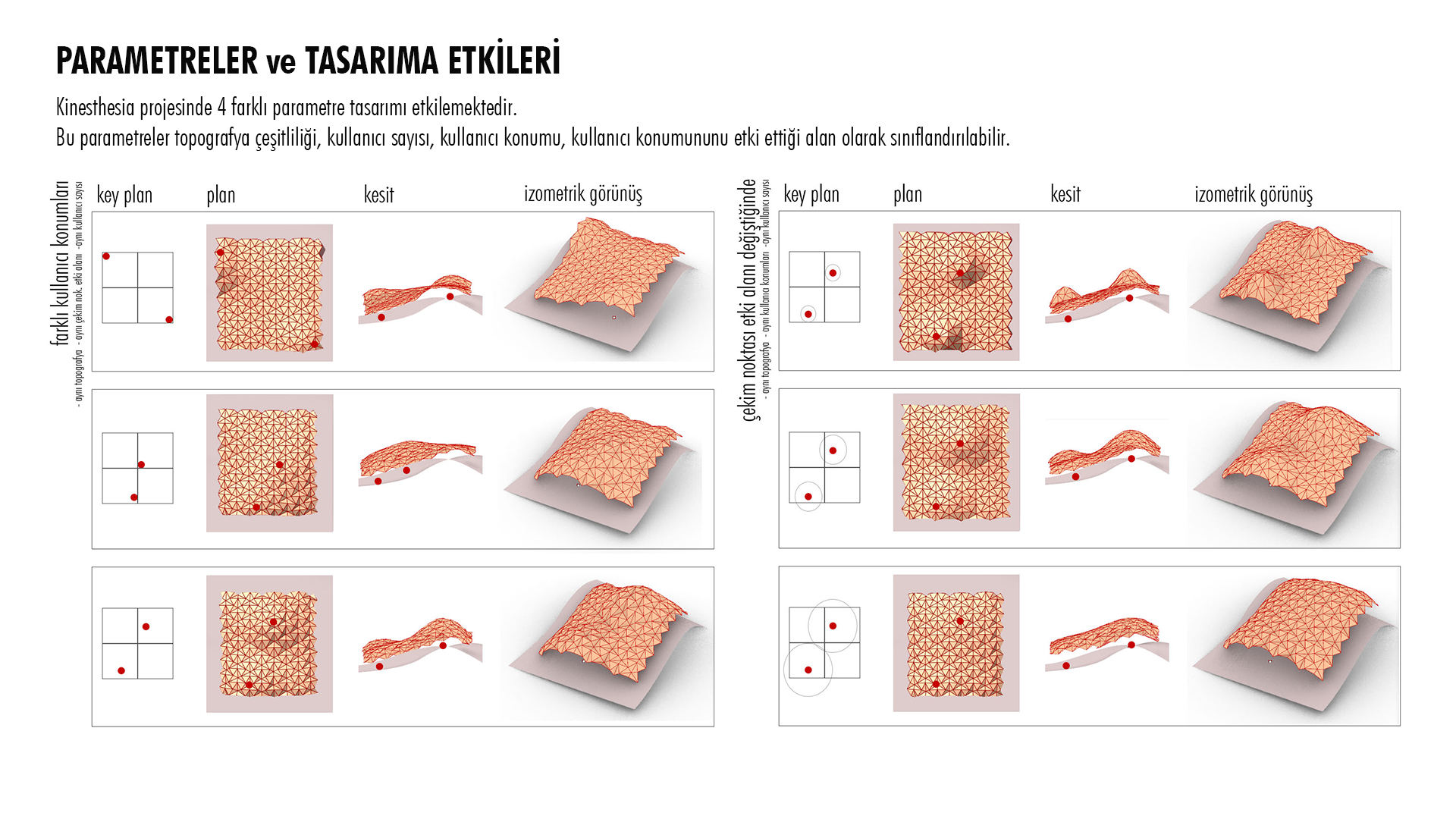
Structural change – structure change according to parameters.2
Kinesthesia _ User Interactive Structure Design Using Ron Resch Module
Teknolojinin gelişmesi ile birlikte tasarımcı zihninde kurguladığı tasarımı üretme fırsatı bulmuştur. Bu süreçte daha esnek, adapte edilebilir mimari ürünler üretilme olanağı artmaktadır. Kullanıcı ve mekan etkileşiminin öneminin vurgulandığı günümüz mimari tartışmalarını göz önünde bulundurduğumuzda hesaplamalı tasarım araçları bu konuda kullanılabilecek fonksiyonel bir araç haline gelmiştir. Bu çalışma, mekan ve kullanıcı etkileşimini irdelemek ve hesaplamalı tasarım araçları kullanılarak kinetik bir strüktür tasarlamayı hedeflenmektedir.Kullanıcı ile etkileşim halinde olan, kullanıcı hareketlerine göre farklı silüetler oluşturan, sürekli dönüşen ve değişen bir sistem olarak kurgulanan proje, alt birimlerden oluşmaktadır. Alt birim veya modül ilişkilerinin büyük önem taşıdığı projede, kendi strüktürünü içerisinde barındıran bir sistem olarak origami sanatından yararlanılmaya karar verilmiştir. Origami örüntüleri araştırmaları sonucunda strüktürel, geometrik origamiler arasından Ron Resch modülü ile çalışılmaya karar verilmiştir. Modül içi ve modüller arası kuralları, üçgen yüzeylerden oluşması nedeniyle katlanma ara süreçlerinde proje için uygun ara formlar oluşturması nedeniyle, Ron Resch modülünün çoğaltılması ile strüktür oluşturulmuştur.
Autopoiesis kavramı; organizmaları, yapıları, örgütleri, mekanizmaları, doğal oluşumları bir bütün oluşturacak biçimde birbirleriyle ve çevreleriyle ilişkili unsurlar olarak ele alır. Bu kavrama göre belirli bir sistemi alt birimlerindeki hareketler tanımlamaktadır. Bu da kompleks sistemlerin küçük parçalara bölünmesi ve basit kural setlerine göre hareket etmesi ile oluşabileceği düşüncesini oluşturmaktadır. Projedeki sistemin küçük alt modüllerden oluşması, modül içi ve modüller arası ilişkilerin projede önemli olması ve sistemin sürekli değişim ve dönüşüm halinde olması nedeniyle proje autopoiesis kavramı ile doğrudan ilişkilendirilebilir.
Projede, Rhino-Grasshopper programı kullanılarak dijital üretimi gerçekleştirilmiştir. Kangaroo plug-ini kullanılarak origami katlama süreçleri simüle edilmiştir. Grasshopper script oluşum aşamaları sırasıyla: Ron Resch modülünden örüntünün üretilmesi, seçilen topografyaya örüntünün yansıtılması ve kullanıcı olarak soyutlaştırılan bir çekim nktasının Ron Resch modülü mesnet noktalarına etki etmesi şeklindedir. Çekim noktasının mesnet noktalarına mesafesine göre mesnet noktalarının z koordinat eksenin de pozitif ve negatif gönde değişimi ile strüktür hareketi sağlamaktadır. Buna ek olarak kullanıcının konum değiştirdiği süreçle eş zamanlı olarak Kangaroo plug-ini çalıştığı için Ron Resch modülü katlanma kuvvetleri de sisteme etki etmektedir. Bu hareketle birlikte strüktür sadece Z aksında değil 3 boyutlu uzayda farklı yönlere doğru hareket edebilmektedir. Böylece zengin bir silüet elde edilmiştir.
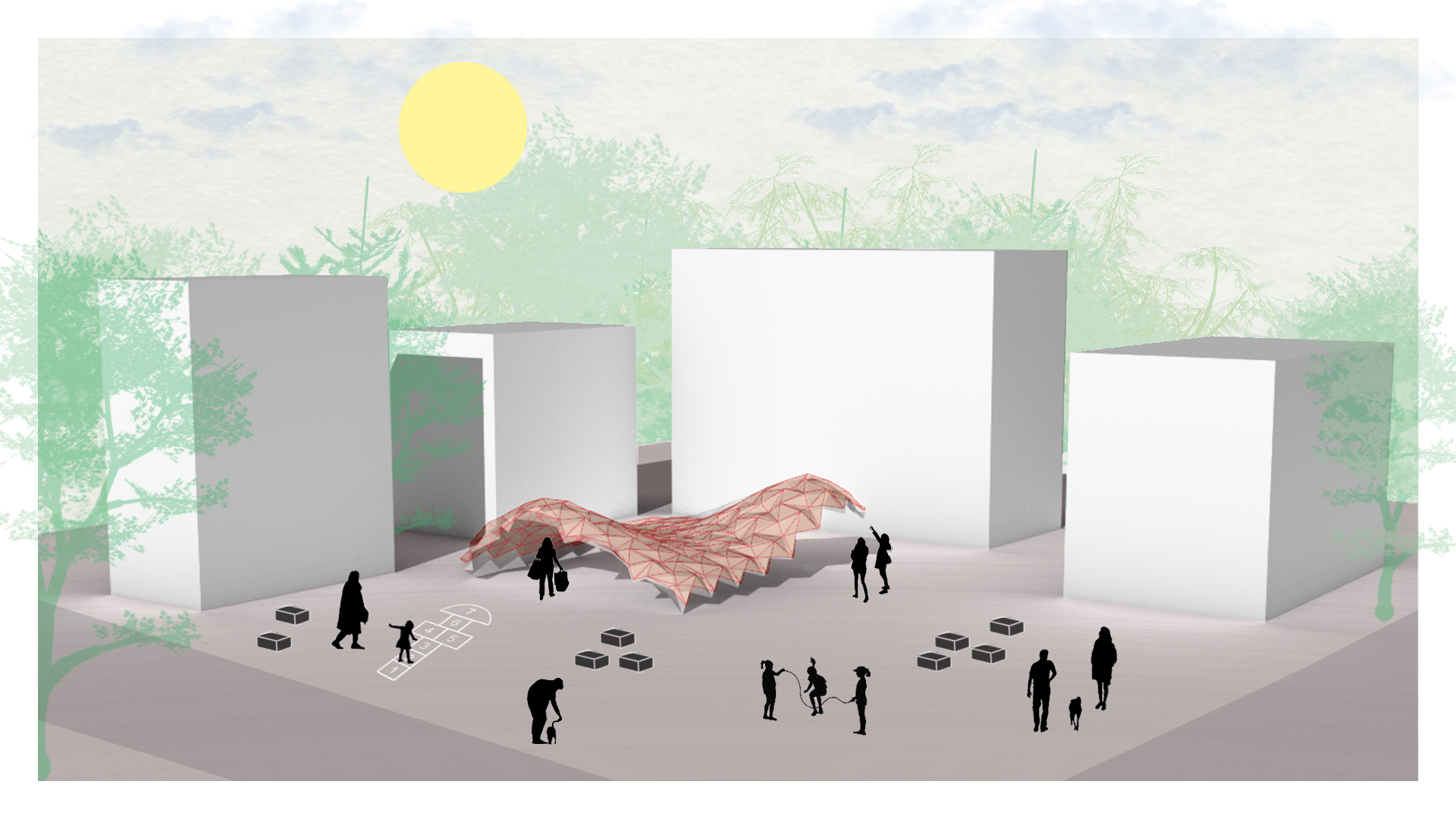
Strüktür başlangıç pozisyonu topografyadan 150 cm yüksete olamsı planlanmıştır. Strüktür altında insan boyutu için yeterli olmayacak bir boşluk oluşturmasındaki temel hedef kullanıcının yaklaşması ile birlikte strüktürün yüksekliğinin artacak olması ve böylece kullanıcının örtüyü, örtünün de kullanıcıyı yönlendireceği bir mutualist ilişkinin gerçekleşmesidir. Böylece strüktürün altında bulunan kullanıcı için de farklı bir deneyim oluşturulması hedeflenmiştir.
Anahtar Kelimeler: Origami Strüktür, Kinetik Mimarlık, Etkileşimli Mimarlık, Autopoiesis

Nurdan Akman
akman.nurdan@gmail.com
Teknolojinin gelişmesi ile birlikte tasarımcı zihninde kurguladığı tasarımı üretme fırsatı bulmuştur. Bu süreçte daha esnek, adapte edilebilir mimari ürünler üretilme olanağı artmaktadır. Kullanıcı ve mekan etkileşiminin öneminin vurgulandığı günümüz mimari tartışmalarını göz önünde bulundurduğumuzda hesaplamalı tasarım araçları bu konuda kullanılabilecek fonksiyonel bir araç haline gelmiştir. Bu çalışma, mekan ve kullanıcı etkileşimini irdelemek ve hesaplamalı tasarım araçları kullanılarak kinetik bir strüktür tasarlamayı hedeflenmektedir.Kullanıcı ile etkileşim halinde olan, kullanıcı hareketlerine göre farklı silüetler oluşturan, sürekli dönüşen ve değişen bir sistem olarak kurgulanan proje, alt birimlerden oluşmaktadır. Alt birim veya modül ilişkilerinin büyük önem taşıdığı projede, kendi strüktürünü içerisinde barındıran bir sistem olarak origami sanatından yararlanılmaya karar verilmiştir. Origami örüntüleri araştırmaları sonucunda strüktürel, geometrik origamiler arasından Ron Resch modülü ile çalışılmaya karar verilmiştir. Modül içi ve modüller arası kuralları, üçgen yüzeylerden oluşması nedeniyle katlanma ara süreçlerinde proje için uygun ara formlar oluşturması nedeniyle, Ron Resch modülünün çoğaltılması ile strüktür oluşturulmuştur.
Autopoiesis kavramı; organizmaları, yapıları, örgütleri, mekanizmaları, doğal oluşumları bir bütün oluşturacak biçimde birbirleriyle ve çevreleriyle ilişkili unsurlar olarak ele alır. Bu kavrama göre belirli bir sistemi alt birimlerindeki hareketler tanımlamaktadır. Bu da kompleks sistemlerin küçük parçalara bölünmesi ve basit kural setlerine göre hareket etmesi ile oluşabileceği düşüncesini oluşturmaktadır. Projedeki sistemin küçük alt modüllerden oluşması, modül içi ve modüller arası ilişkilerin projede önemli olması ve sistemin sürekli değişim ve dönüşüm halinde olması nedeniyle proje autopoiesis kavramı ile doğrudan ilişkilendirilebilir.
Projede, Rhino-Grasshopper programı kullanılarak dijital üretimi gerçekleştirilmiştir. Kangaroo plug-ini kullanılarak origami katlama süreçleri simüle edilmiştir. Grasshopper script oluşum aşamaları sırasıyla: Ron Resch modülünden örüntünün üretilmesi, seçilen topografyaya örüntünün yansıtılması ve kullanıcı olarak soyutlaştırılan bir çekim nktasının Ron Resch modülü mesnet noktalarına etki etmesi şeklindedir. Çekim noktasının mesnet noktalarına mesafesine göre mesnet noktalarının z koordinat eksenin de pozitif ve negatif gönde değişimi ile strüktür hareketi sağlamaktadır. Buna ek olarak kullanıcının konum değiştirdiği süreçle eş zamanlı olarak Kangaroo plug-ini çalıştığı için Ron Resch modülü katlanma kuvvetleri de sisteme etki etmektedir. Bu hareketle birlikte strüktür sadece Z aksında değil 3 boyutlu uzayda farklı yönlere doğru hareket edebilmektedir. Böylece zengin bir silüet elde edilmiştir.
Strüktür başlangıç pozisyonu topografyadan 150 cm yüksete olamsı planlanmıştır. Strüktür altında insan boyutu için yeterli olmayacak bir boşluk oluşturmasındaki temel hedef kullanıcının yaklaşması ile birlikte strüktürün yüksekliğinin artacak olması ve böylece kullanıcının örtüyü, örtünün de kullanıcıyı yönlendireceği bir mutualist ilişkinin gerçekleşmesidir. Böylece strüktürün altında bulunan kullanıcı için de farklı bir deneyim oluşturulması hedeflenmiştir.
Anahtar Kelimeler: Origami Strüktür, Kinetik Mimarlık, Etkileşimli Mimarlık, Autopoiesis
Kinesthesia – structural change
Kinesthesia _ User Interactive Structure Design Using Ron Resch Module
Structural change – structure change according to parameters.1.jpg
Structural change – structure change according to parameters.2
Nurdan Akman
akman.nurdan@gmail.com
© 2021 Istanbul Technical University Graduate School, Department of Informatics, Architectural Design Computing Programme. All Rights Reserved